


Omaha Children's Museum Animatronics UI and Controller
Completed
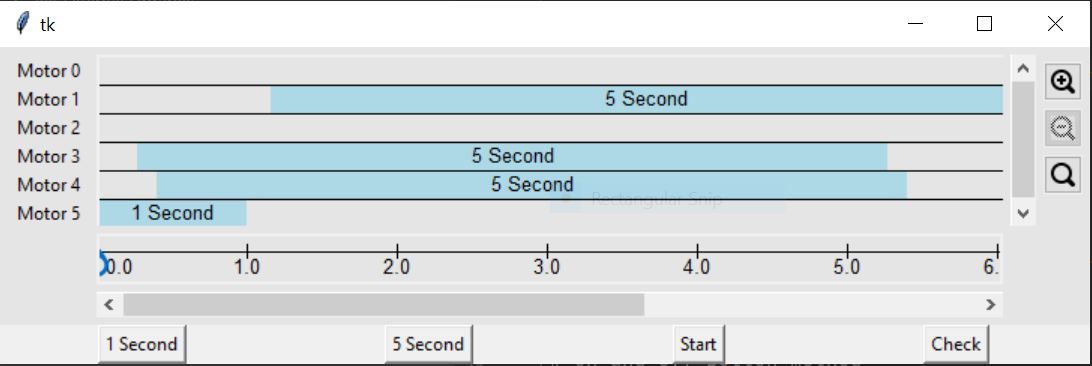
The UI was created using TKinter, a python UI library. The controller took user inputs on a timeline using a 6 bits linked to the 6 motors of the animatronic. When one of the bits was on or "1" the corresponding motor would turn on. When turned to "0" it would power off. The timeline automatically adjusted to the time set by the users inputs.
On the left there was a live and preset version. The live where you can interact real time has the green and red buttons. The other version was preset.
Levi Houlton
Computer Software Engineer
© Copyright. All rights reserved.